PPO算法:Proximal Policy Optimization
一、引言
PPO的特点:
PPO 采用了代理目标函数(surrogate object function),一个样本可以经历多个 epoch 的小批量更新,而常规的 Policy Gradient 算法每个数据样本只进行一次梯度更新。它具备 TRPO 的优点,同时更简单,样本复杂度也更优。
其他算法的不足:
- Q-learning:在许多简单问题上表现不佳,且其原理尚未被充分理解。
- Vanilla PG:数据效率低,鲁棒性差。
- TRPO:较为复杂,与包含噪声或参数共享的架构不兼容。
二、相关算法目标函数
2.1 Policy Gradient Methods
目标奖励函数为:
\[L^{PG}(\theta)=\hat{\mathbb{E}}[log \pi_{\theta}(a_{t} | s_{t}) \hat{A}_{t}]\]其中,\(\hat{A}_{t}\)是时间步t处优势函数的估计量,\(\hat{A}_{t}=q(a_{t}, s_{t})-b(s_{t})\)。
需要注意的是,使用相同的轨迹对这个损失 $L^{PG}$ 进行多步优化虽然很有吸引力,但缺乏理论证明,而且在实际中常常会导致破坏性的大幅策略更新。
2.2 TRPO
目标奖励函数为:
\[\underset{\theta}{maxmize} \hat{\mathbb{E}}[\frac{\pi_{\theta}(a_{t} | s_{t})}{\pi_{\theta_{old }}(a_{t} | s_{t})} \hat{A}_{t}]\]约束条件:
\[s.t. \hat{\mathbb{E}}_{t}[K L[\pi_{\theta_{old }}(* | s_{t}), \pi_{\theta_{old }}(* | s_{t})]] \leq \delta\]因此,TRPO 本质上求解的是以下最优化问题:
\[\underset{\theta}{maxmize} \hat{\mathbb{E}}[\frac{\pi_{\theta}(a_{t} | s_{t})}{\pi_{old }(a_{t} | s_{t})} \hat{A}_{t}-\beta K L[\pi_{old }(a_{t} | s_{t}), \pi_{\theta}(a_{t} | s_{t})]]\]TRPO 使用硬约束而非将约束带入优化目标作为惩罚项,原因是难以找到单一固定的惩罚系数\(\beta\)。
三、PPO 1:Clipped Surrogate Objective
重要性采样系数\(r_{t}(\theta)=\cfrac{\pi_{\theta}(a_t|s_t)}{\pi_{\theta_{old}}(a_t|s_t)}\)某种程度上也可以衡量新旧策略之间的差异程度。 对于初始策略\(r_{old}(\theta)=1\)。
\[L^{CPI}(\theta)=\hat{\mathbb{E}}[\frac{\pi_{\theta}(a_{t} | s_{t})}{\pi_{\theta_{old }}(a_{t} | s_{t})} \hat{A}_{t}]=\hat{\mathbb{E}}[r_{t}(\theta) \hat{A}_{t}]\]这是 TRPO 最大化的代理目标函数(CPI:conservative policy iteration)。
直接优化上述目标会导致很大幅度的策略更新,因此需要对策略更新的幅度($r_{t}(\theta)$ 偏离 1 的程度)进行惩罚。
PPO 代理目标函数
\[L^{C L I P}(\theta)=\hat{\mathbb{E}}[min(r_{t}(\theta) \hat{A}_{t}, clip(r_{t}(\theta), 1-\epsilon, 1+\epsilon) \hat{A}_{t})].\]第一项\(r_{t}(\theta) \hat{A}_{t}\) 就是 \(L^{CPI}\)。
第二项\(clip(r_{t}(\theta), 1-\epsilon, 1+\epsilon) \hat{A}_{t}\) 是截断目标,消除了将\(r_{t}\)移到区间\([1-\epsilon, 1+\epsilon]\)之外的动机。
最终的目标取第一项和第二项的最小值,所以最终目标是未截断目标的一个下界(悲观界)。
如果没有约束条件,最大化\(L^{CPI}\)将会导致过大的策略更新,因此需要考虑修改上述目标函数,以惩罚使\(r_{t}(\theta)\)远离1的策略变化。
不同情况下的取值
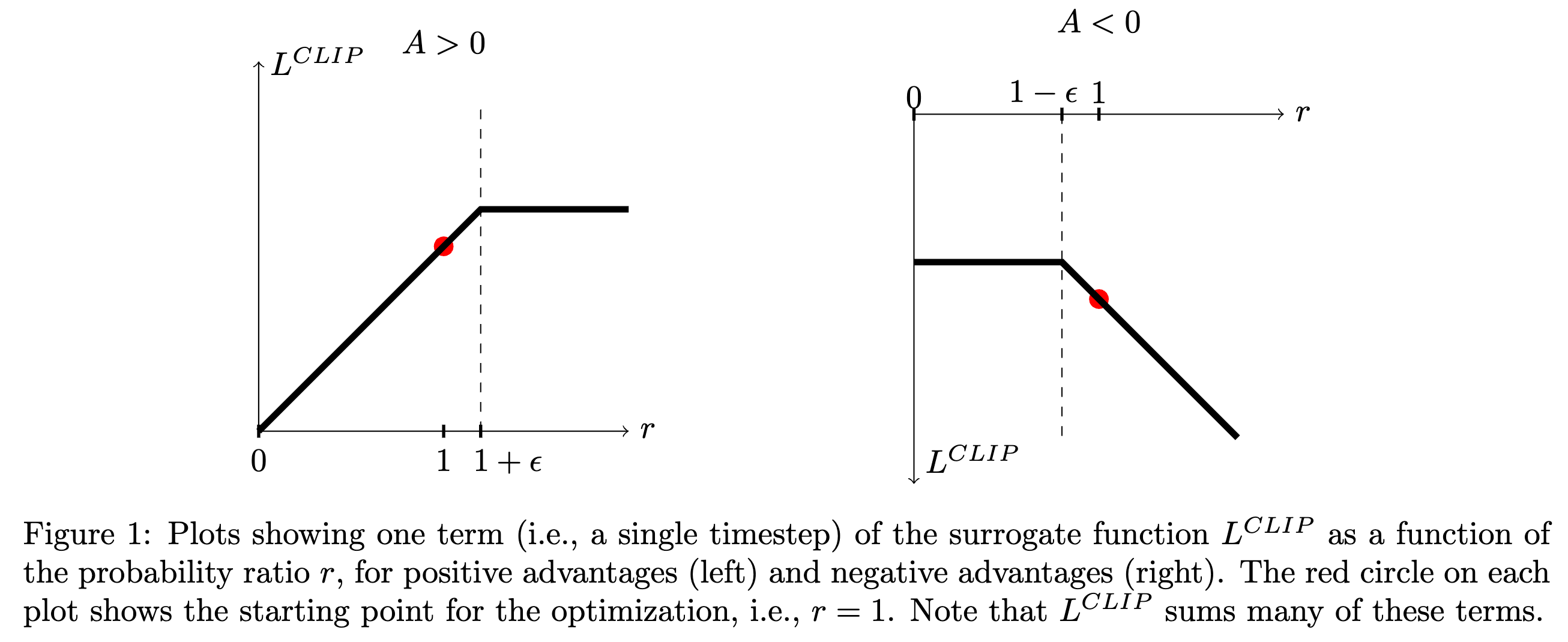
| $A_t$ | $0< r_t< \infty$ | $clip$ | $min(r_tA_t, clip)$ |
|---|---|---|---|
| + | $1+\epsilon < r_t< +\infty$ | $1+\epsilon$ | $(1+\epsilon)\times A_t$ |
| + | $1-\epsilon < r_t < 1+\epsilon$ | $r_t$ | $r_t\times A_t$ |
| + | $0< r_t < 1-\epsilon$ | $1-\epsilon$ | $r_t\times A_t$ |
| - | $1+\epsilon < r_t < +\infty$ | $1+\epsilon$ | $r_t\times A_t$ |
| - | $1-\epsilon < r_t < 1+\epsilon$ | $r_t$ | $r_t\times A_t$ |
| - | $0 < r_t <1-\epsilon$ | $1-\epsilon$ | $(1-\epsilon)\times A_t$ |
策略更新对比
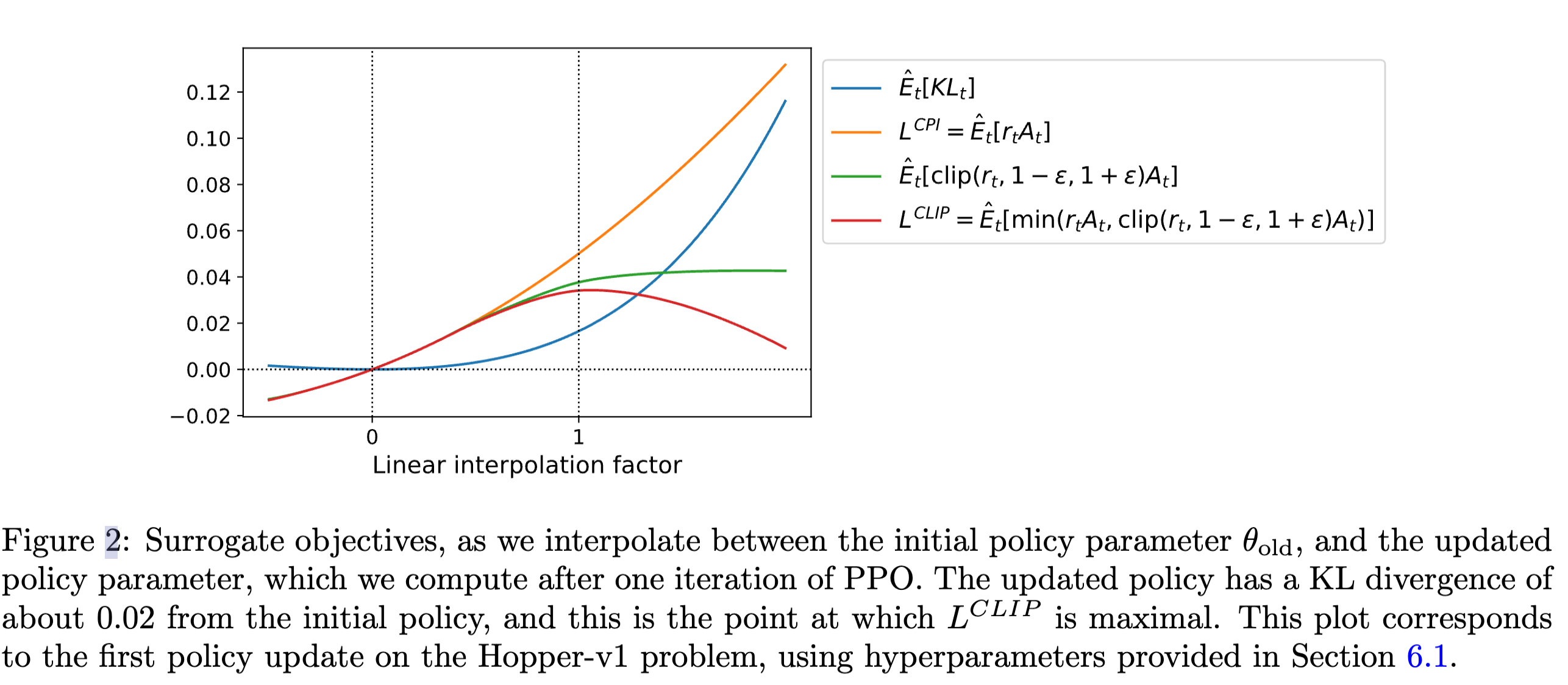
在 PPO 论文的 Figure2 中,线性插值因子是理解代理目标函数\(L^{CLIP}\)与原始目标\(L^{CPI}\)关系的关键。该实验基于连续控制问题,通过策略更新方向的线性插值(即从旧策略\(\theta_{old }\) 到新策略\(\theta_{new }\)的插值),展示了多个目标函数的变化趋势。
插值公式:设插值因子为\(\epsilon \in[0,1]\),中间策略为\(\theta_{\epsilon} = \theta_{\text{old}} + \epsilon (\theta_{\text{new}} - \theta_{\text{old}})\)
当\(\epsilon=0\)时,策略为旧策略;
当\(\epsilon=1\)时,策略为新策略;中间值表示不同幅度的策略更新。
目标函数对比:实验对比了\(L^{CLIP}\)(裁剪后的代理目标)与\(L^{CPI}\)(保守策略迭代的原始目标),以及可能的其他目标(如 KL 散度、奖励函数等)。
四、PPO 2:Adaptive KL Penalty Coefficient β
这种形式将 KL 散度约束作为惩罚项放到目标函数中,同时自适应调节 KL 项惩罚系数\(\beta\),目标函数为:
\[L^{KLPEN}(\theta) = \hat{\mathbb{E}}[\cfrac{\pi_{\theta}(a_t|s_t)}{\pi_{\theta_{old}}(a_t|s_t)}\hat{A}_t] - \beta KL[\pi_{old}(\cdot|s_t), \pi_{\theta}(\cdot|s_t))]\]同时,根据KL散度取值自适应调节:
\[d=\mathbb{\hat{E}}_{t}[KL[\pi_{old}(\cdot|s_{t}), \pi_{\theta}(\cdot|s_{t})]]\]若 $d<d_{tar } / 1.5$,则$\beta \leftarrow \beta / 2$
若 $d>d_{tar} \times 1.5$,则$\beta \leftarrow \beta \times 2$
五、Actor和Critic共享参数架构
- 很多算法为了降低优势函数的估计误差都会学习状态值函数 $v(s)$,因此可以使用 actor 和 critic 共享的架构,例如:
High-Dimensional Continuous Control Using Generalized Advantage Estimation
Asynchronous Methods for Deep Reinforcement Learning
相关公式:
\[L_{t}^{CLIP+VF+S}(\theta)=\hat{\mathbb{E}}_{t}[L_{t}^{CLIP}(\theta)-c_{1} L_{t}^{VF}(\theta)+c_{2}S[\pi_{\theta}](s_{t})]\]其中,$L_{t}^{V F}(\theta)=(V_{\theta}(s_{t})-V_{t}^{target})^{2}$
为了保证算法探索性能可以增加 entropy bonus。
有些 PG 算法让策略运行 T 个时间步,使用以下优势函数:
六、GAE: General Advantage Estimation
- High-Dimensional Continuous Control Using Generalized Advantage Estimation
- https://arxiv.org/pdf/1506.02438
针对策略梯度(Policy Gradient)算法存在的两个主要问题突出的解决方案:
问题:
- 样本效率低
- 在训练样本数据不断变化的情况下如何稳定得获得策略提升? 方法:
- GAE
- TRPO
考虑一个undiscounted($\gamma=1$)形式的MDP策略优化问题,策略梯度算法通过最大化累计奖励期望值来进行策略提升: \(g :=\nabla_{\theta}\mathbb{E}[\sum_{t=0}^{\infty}r_t] = \mathbb{E}[\sum_{t=0}^{\infty}\Psi_t\nabla_{\theta}log\pi_{\theta}(a_t|s_t)]\) 其中$\Psi_t$有以下几种形式:
- $\sum_{t=0}^{\infty}r_t$:轨迹的累计奖励
- $\sum_{t=t’}^{\infty}r_t$:执行动作$a_{t’}$之后的累计奖励(rewards to go)
- $\sum_{t=t’}^{\infty}r_t - b(s_t)$:减去baseline
- $Q^{\pi}(s_t,a_t)$:动作价值函数
- $A^{\pi}(s_t,a_t)=Q^{\pi}(s_t,a_t)-V^{\pi}(s_t)$:优势函数
- $\delta_t = r_t + \gamma v(s_{t+1}) - v(s_t)$:TD Error
动作价值函数: \(Q^{\pi}(s_t,a_t)=\mathbb{E}_{s_{t+1}:\infty,a_{t+1}:\infty}\sum_{l=0}^{\infty}r_{t+l}\)
状态价值函数: \(V^{\pi}(s_t)=\mathbb{E}_{s_{t+1}:\infty,a_t:\infty}\sum_{l=0}^{\infty}r_{t+l}\)
TD Error: \(\delta_t=r_t + \gamma v(s_{t+1}) - v(s_t)\) \(\delta_{t+1}=r_{t+1} + \gamma v(s_{t+2}) - v(s_{t+1})\)
优势函数的估计
针对优势函数进行策略梯度估计:
\[\hat{g}=\cfrac{1}{N}\sum_{n=t}^{N}\sum_{t=0}^{\infty}\hat{A_t^n}\nabla_{\theta}log\pi(a_t^n|s_t^n)\] \[\hat{A}_t^{(1)}:=\delta_t^V=-V(s_t)+r_t+\gamma V(s_{t+1})\] \[\hat{A}_t^{(2)}:=\delta_t^V + \gamma\delta_{t+1}^V=-V(s_t)+r_t+\gamma r_{t+1}+\gamma{^2} V(s_{t+2})\] \[\hat{A}_t^{(3)}:=\delta_t^V+ \gamma\delta_{t+1}^V + {\gamma}^2\delta_{t+2}^V=-V(s_t)+r_t+\gamma r_{t+1}+\gamma{^2} r_{t+2}+\gamma{^3} V(s_{t+3})\] \[...\] \[\hat{A}_t^{(k)}:=\sum_{t=0}^{k-1}\gamma^{l}\delta_{t+l}^V=-V(s_t)+r_t+\gamma r_{t+1}+\gamma{^2} r_{t+2}+...+\gamma{^k} V(s_{t+k})\] \[\hat{A}_t^{(\infty)}:=\sum_{t=0}^{\infty}\gamma^{l}\delta_{t+l}^V=-V(s_t)+\sum_{l=0}^{\infty}\gamma^{l}r_{t+l}\]GAE定义为: \(\begin{align} \hat{A}_t^{GAE(\gamma, \lambda)} &:=(1-\lambda)(\hat{A}_t^{(1)}+\lambda\hat{A}_t^{(2)}+\lambda^2\hat{A}_t^{(3)}+...)\\ &:=\sum_{l=0}^{\infty}(\gamma\lambda)^l\delta_{t+1}^V \end{align}\)
$\gamma$和$\lambda$的作用都是平衡优势函数估计的偏差和方差:
- 当$\lambda=0$的时GAE估计低方差高偏差 \(GAE(\gamma, 0) = r_t + \gamma V(s_{t+1}) -V(s_t)\)
- 当$\lambda=1$的时GAE低偏差高方差 \(GAE(\gamma, 1) = \sum_{l=0}^{\infty}\gamma ^{l}r_{t+l}-V(s_t)\)
- $\gamma$主要决定了scale of the value function $V^{\pi, \gamma}$,引入$\gamma<1$会给策略梯度的估计带来bias